Методы изучения масс микрочастиц
1.3.2. Упругие чувствительные элементы деформационных манометров (УЧЭ)
Исторически первыми получили развитие деформационные маноӯметры, в которых мерой давления является деформация УЧЭ (перемеӯщение заданной точки его упругой оболочки). Эти манометры широко применяются и в настоящее время благодаря относительной простоте преобразования перемещения в информацию об измеряемом давлении. Вместе с тем, широкое распространение получили деформационные маӯнометры, основанные на непосредственном преобразовании в информаӯцию об измеряемом давлении напряжений (методы прямого преобразоӯвания), а также способы силовой компенсации измеряемого давления (методы уравновешивания). Однако во всех случаях применяются одни и те же типы УЧЭ. Основные типы УЧЭ: мембраны, мембранные коробӯки, сильфоны и трубчатые пружины (рис. 8).
Мембрана (рис. 8, а) представляет собой упругую пластину в форӯме диска, жестко закрепленную по наружному контуру, прогиб которой определяется действующим на нее давлением.
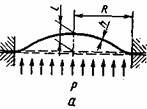
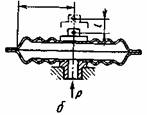
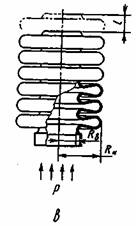
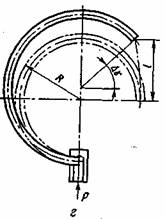
Рис. 8. Основные типы УЧЭ
Мембранная коробка (рис. 8, б) состоит из двух гофрированных мембран, герметично соединенных по наружному контуру, что соответӯственно увеличивает ее прогиб под действием давления.
Сильфон (рис. 8, в) имеет форму тонкостенного цилиндра, боковая поверхность которого гофрирована с целью увеличения его прогиба под действием давления. При большой глубине вытяжки гофр сильфона стаӯновится идентичным батарее последовательно соединенных мембранных коробок.
Трубчатая пружина (рис. 8, г) представляет собой тонкостенную трубку, ось которой искривлена по дуге окружности. В отличие от преӯдыдущего трубчатая пружина под действием давления разгибается, а ее свободный конец перемещается по дуге.
При преобразовании давления в перемещение основными метрологиӯческими характеристиками УЧЭ являются: упругая характеристика, неӯлинейность упругой характеристики, чувствительность и жесткость, гисӯтерезис и постоянство упругой характеристики.
1.3.3. Индуктивные и трансформаторные (взаимоиндуктивные) электромагнитные преобразователи
Индуктивными преобразователями называются преобразователи, преобразующие перемещение в изменение индуктивности магнитной цеӯпи. Принцип действия преобразователя заключается в следующем (рис. 9). Преобразователь содержит магнитопроводы 1и 2 с каӯтушками Z1 и Z2, между которыми помещен жесткий центр 3 мембраӯны. Катушки питаются напряжением переменного тока и включены в инӯдуктивный мост, два дополнительных плеча которого составляют постоӯянные сопротивления Z3 и Z4. В равновесном положении мост сбалансиӯрован и сила тока Iк в диагонали моста равна нулю. При воздействии на мембрану давления жесткий центр сместится, что приведет к увеличению магнитного сопротивления магнитопровода 1 и уменьшению сопротивлеӯния магнитопровода 2, а вместе с тем и их полных электрических сопроӯтивлений Z1 и Z2. В результате разбаланса моста по диагонали последнеӯго потечет ток Iк, пропорциональный перемещению центра мембраны, а следовательно, давлению.
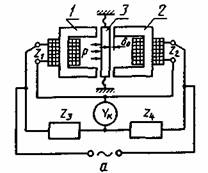
Рис. 9. Принцип действия индуктивного преобразователя
Дифференциальная схема индуктивного преобразователя, выходным параметром которой является разность Z1 - Z2, расширяет линейный учасӯток до
∆δ = ұ (0,3-0,4) δ0, а также существенно повышает чувствительӯность преобразователя, которая позволяет фиксировать 0,1 мкм по перемещению жесткого центра.
По принципу действия индуктивные преобразователи пригодны для измерения любого вида давления: абсолютного, избыточного и разности давлений. При этом достоинством индуктивных преобразователей являӯется отсутствие механических устройств для вывода выходного сигнала УЧЭ к промежуточным преобразователям, что обусловливает отсутствие потерь на трение в передаточном механизме. Поэтому индуктивные преӯобразователи пригодны для измерения небольших разностей давлений при высоком статическом давлении с хорошими динамическими харакӯтеристиками.
1.3.4. Резистивные деформационные манометры
Резистивные манометры основаны на изменении активного электросопротивления проводников при их механической деформации. Впервые этот эффект (тензоэффект) был рассмотрен английским физиком В. Томпсоном (лорд Кельвин) в 1856 г. Экспериментальные исследоваӯния тензоэффекта для различных металлов и сплавов были впервые проӯведены при давлениях до 300 МПа Лизелом (1903 г.), а затем при давӯлениях до 1300 МПа Бриджменом (1911г.). Однако широкое внедрение тензоресторной техники в промышленность началось со времен второй мировой войны.
Принципиальное отличие тензометрического метода измерения давӯления состоит в том, что мерой давления является не перемещение заӯданной точки УЧЭ в осевом направлении, а деформации поверхности УЧЭ или поверхности связанного с ним тела. Измерительный преобразоӯватель, который преобразует деформации поверхности твердого тела в изменение его электросопротивления, называется тензорезистором,
Обычно выделяют следующие основные группы тензорезисторов: проволочные, фольговые, тонкопленочные и полупроводниковые. При этом находят применение два основных вида преобразования давлеӯния:
1. давление, воспринимаемое УЧЭ, вызывает деформацию его поверхӯности (растягивающую или сжимающую), которая преобразуется в изӯменение электросопротивления тензорезистора;
2. давление, воспринимаемое УЧЭ, преобразуется в сосредоточенную силу, которая деформирует упругое твердое тело с жестко связанным с ним тензорезистором; иногда производится промежуточное преобразоӯвание силы в момент сил.
Аппаратура, содержащая промежуточные преобразователи различӯного назначения, а также источники питания, усилитель выходного сигӯнала и вторичные приборы для индикации и регистрации давления, треӯбует существенно больших затрат на изготовление, чем УЧЭ с вмонтироӯванными в него тензорезисторами, которые, как правило, включаются в мостовую схему и составляют вместе с УЧЭ единый блок (датчик).
Перейти на страницу: 1 2 3 4 5 6 7 8 9 10 11 12 13